Votre compte a été créé avec succès !
Merci !
0
0 €
0 €
0
0 €
0 €
Total
€
Merci !
Votre compte a été créé avec succès !
Article paru dans L’information Dentaire n°31 – 2023.
Renaud Noharet – Docteur en chirurgie dentaire, Maître de conférences des universités Docteur de l’université Lyon 1 Praticien Hospitalier
Le diagnostic et la solution thérapeutique de type All-on-4 peuvent sembler simples, mais pas faciles pour autant : les implants devront être bien positionnés afin de :
– obtenir l’ostéointégration initiale (aspect biologique),
– pérenniser cette dernière par le maintien des tissus périimplantaires (aspect biologique),
– pérenniser la prothèse implantaire (aspect fonctionnel et mécanique).
Pour répondre à ces objectifs, nous proposons dans cet article de mettre en avant la technique de navigation chirurgicale par l’intermédiaire de la présentation d’une situation clinique traitée.
Un patient de 63 ans se présente à la consultation en expliquant ses doléances quant à son absence de dents maxillaires, remplacées par un appareil amovible non confortable et non fonctionnel. Ce patient ne présente aucune pathologie et/ou médication (fig. 1, 2, 3 et 4). La solution implantaire lui est exposée et nous obtenons sa validation thérapeutique. Nous réalisons donc les différents examens et étapes cliniques afin d’obtenir de la part du laboratoire un projet prothétique.
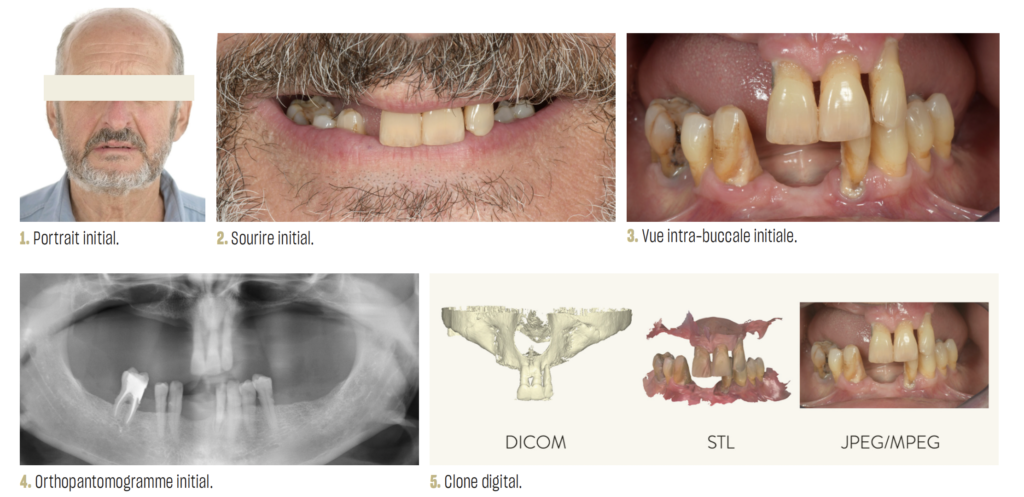
Nous devons récupérer les données indispensables à la reconstruction digitale (ou clone digital) du patient. Ces données permettent de travailler en collaboration avec le prothésiste pour créer un projet global. Elles sont constituées de fichiers DiCom (obtenus par un CBCT), de fichiers STL ou PLY (obtenus par caméra optique ou scanner de laboratoire), mais aussi de fichiers jpeg et mpeg (obtenus par appareil photo ou smartphone) (fig. 5).
Avec les données de la photographie et la vidéo, nous allons pouvoir créer un smile design [2] et le transmettre au prothésiste afin de pratiquer un wax-up du bloc antérieur maxillaire. En effet, le smile design donne la position des dents par rapport aux bases osseuses et muqueuses (fig. 6), mais aussi en fonction des références esthétiques. Afin de transmettre les déterminants postérieurs en corrélation avec l’occlusion, nous utilisons la technique de dentisterie neuromusculaire afin d’enregistrer une position neutre de la mandibule et des articulations.
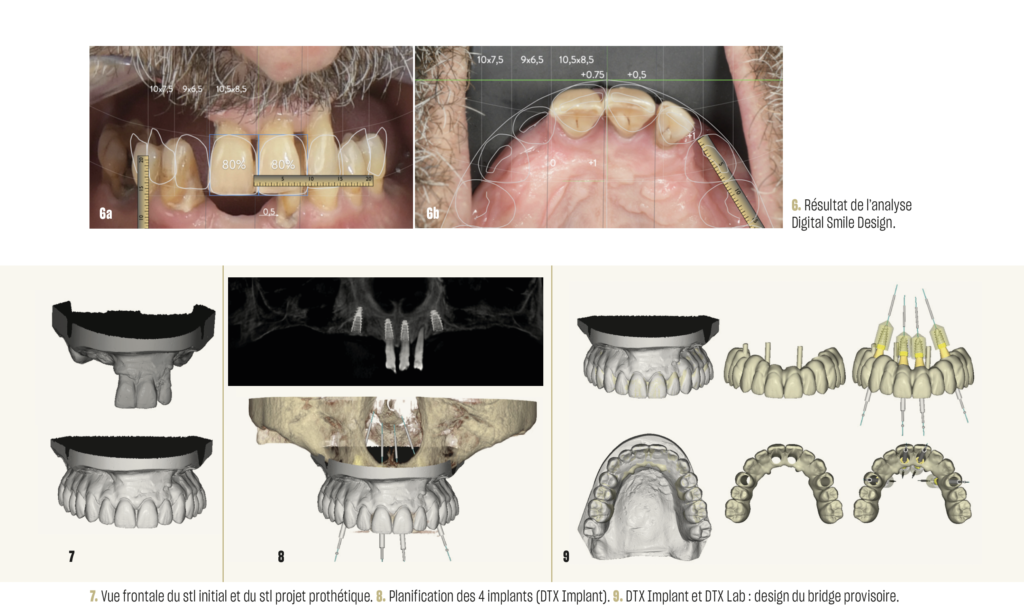
Nous transférons les données requises au laboratoire pour réaliser un projet prothétique correspondant à ces informations. Ce projet prothétique sera obtenu en version stl. Il nous sera alors possible d’indexer ce projet avec le DiCom et donc de planifier les 4 implants (Nobel Biocare N1™) (fig. 7 et 8).
Elle a pour objet de préparer en version numérique le bridge provisoire. Il faut alors adapter le projet prothétique initial au modelage gingival et au positionnement implantaire. Le logiciel va donc intégrer des perforations dans le bridge provisoire afin de faire passer les cylindres temporaires titane permettant de visser le bridge sur les piliers. Des pins osseux temporaires, réalisés dans l’intrados du bridge, vont permettre d’indexer le bridge provisoire sur des repères osseux avant la solidarisation des cylindres provisoires (fig. 9). Le bridge modélisé virtuellement est finalement usiné en résine PMMA (Usineuse Zirkonzahn M5 – Résine : Ivotion Dent Multi – Ivoclar : ce matériau en double réticulation se compose d’une base acrylique et d’un polyméthacrylate de méthyle hautement modifié dans lequel les charges organiques et la matrice PMMA sont réticulées uniformément).
La technique de navigation chirurgicale assure une chirurgie prédictible, sécurisée et reproductible.

C’est un guidage en direct de la chirurgie via un écran. Nous devons donc « viser » la cible présente sur l’écran du dispositif de navigation (X-Guide). Deux caméras repèrent deux trackers (un sur le patient, l’autre sur le contre-angle) et réalisent une triangulation pour permettre un guidage par l’intermédiaire de la vision de la cible sur l’écran (fig. 10).
Selon Pellegrino et al., la navigation dynamique provoque des imprécisions de placement d’implants minimes, comparables à celles obtenues par la chirurgie assistée par ordinateur statique, et peut être considérée comme une technique plus précise que la chirurgie à main levée classique [3]. Selon Shi-Min et al., la précision de l’intervention chirurgicale dynamique assistée par ordinateur atteint une marge d’erreur cliniquement acceptable et peut être utilisée en clinique. Selon cette méta-analyse, la précision (cinq essais cliniques et cinq études de modèles) a révélé une déviation moyenne de la plateforme globale de 1,02 mm avec un intervalle de confiance de 95 % (0,83, 1,21), une déviation de l’apex global de 1,33 mm avec un intervalle de confiance à 95 % (0,98, 1,67) et une déviation angulaire de 3,59° avec un intervalle de confiance à 95 % (2,09, 5,09) [4]. Emery et al. évaluent la précision de la navigation en fonction de l’édentement. À propos de l’édenté complet, la déviation globale est de 0,46 mm (+/- 0,2) au niveau coronaire, de 0,48 mm (+/- 0,21) au niveau apical et la déviation angulaire générale est de 1,09° (+/- 0,55) [5].
1 – Dans un premier temps, le tracker est fixé sur le patient par des vis osseuses (EDX – X nav) au niveau d’une zone vestibulaire assez haute afin d’éviter les futures zones implantaires. L’ensemble doit être parfaitement stable. Le contre-angle avec son propre tracker sera aussi intégré dans la chaîne initiale de calibration.
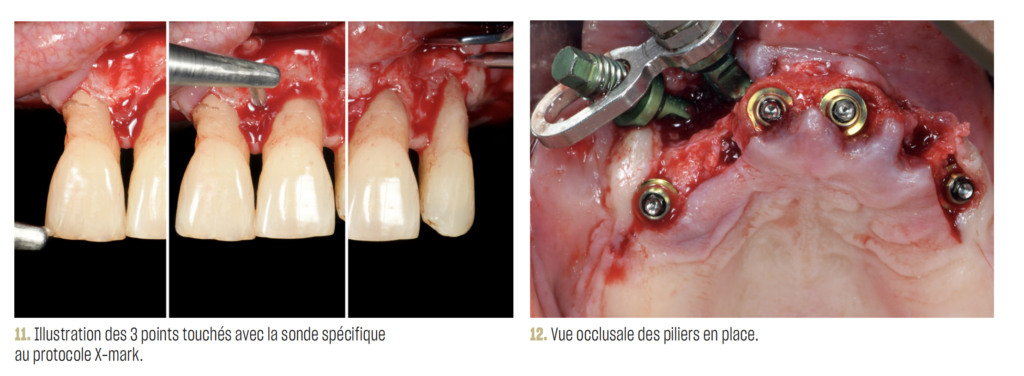
2 – Puis l’étape de calibration (protocole X mark) permet de repérer ce tracker par rapport au volume osseux : il s’agira de cliquer sur des points remarquables (dentaires ou osseux) à l’écran et de venir les toucher cliniquement avec une sonde (elle aussi équipée d’un tracker). Dès lors, la machine est capable de repérer, par rapport au tracker fixé sur l’os, des points remarquables permettant la triangulation et la navigation. Dans le cas de notre patient, nous avons utilisé deux dents de référence et un point osseux secteur 2 [6]. Afin de s’assurer une meilleure précision, un “refinement” surfacique pourra être exécuté. Il s’agit de balayer la sonde avec le tracker sur des surfaces entières de dents ou osseuses. Cela semble être une étape particulièrement pertinente pour améliorer le degré de précision de repérage. Le “refinement” a été exécuté sur l’angle distal de la dent 11, sur le septum osseux inter-incisif et enfin sur le rebord osseux en regard du collet de la 22 (fig. 11).
3 – Les extractions sont réalisées de façon atraumatique.
4 – Au cours de la chirurgie, chaque foret (Osseodirector) et chaque taraud (Osseoshaper) sera calibré, puis l’implant N1 (Nobel Biocare) sera positionné sur les différents sites (14,11,21,24). Les piliers Multi-Unit (MUA Nobel Biocare) sont ensuite vissés sur les 4 implants (fig. 12).
5 – Les perforations recevant les pins osseux du futur bridge provisoire sont alors réalisées. Elles le sont précisément encore une fois grâce à l’aide de l’outil de navigation qui nous permet d’être précis dans le positionnement, l’enfoncement mais aussi l’angulation de ces forages recevant le bridge. Le bridge sera alors bien positionné en fonction de notre travail préopératoire.
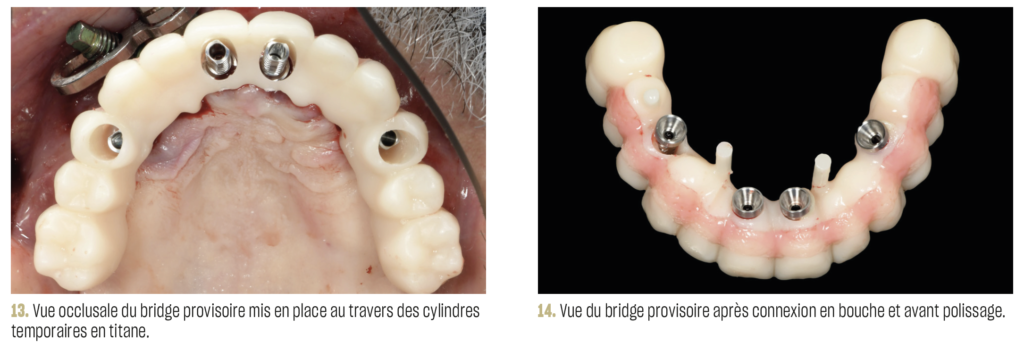
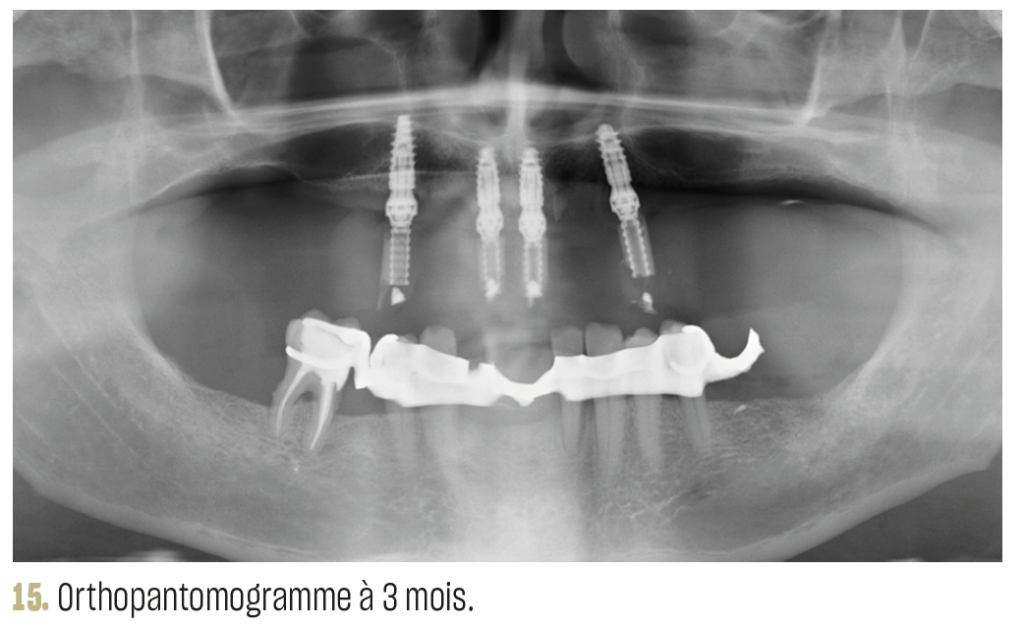
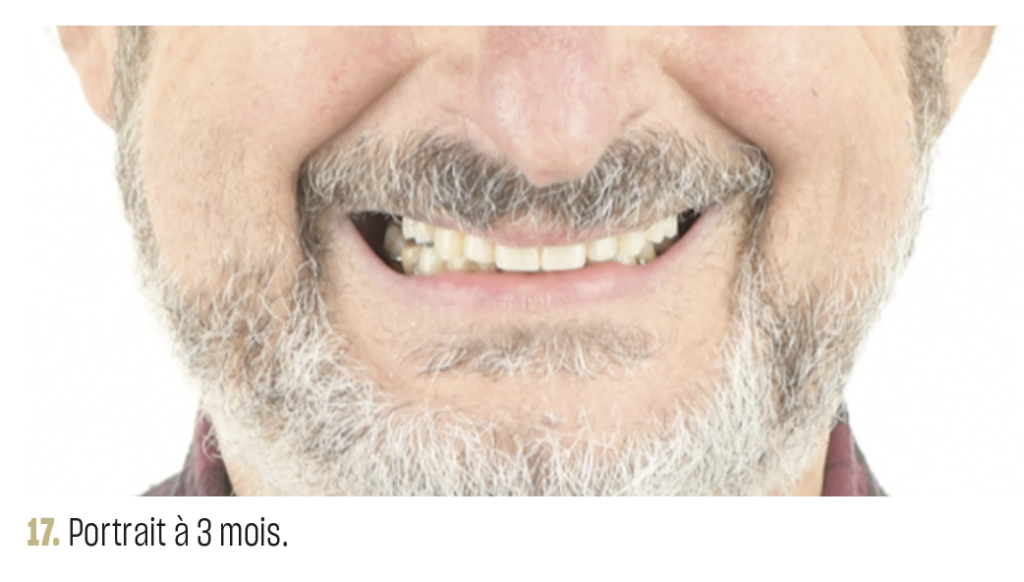
Les étapes prothétiques sont relativement simples. En effet, comme tout a été préparé en amont : il s’agit de visser les cylindres temporaires titanes sur les piliers MUA et ensuite d’insérer le bridge provisoire, en faisant passer chaque cylindre au travers des perforations réalisées dans le design prothétique. Ensuite, il faut enclencher les pins osseux dans leur logement. Le bridge est alors en place. De la résine (ici composite flow GC) est injectée afin de solidariser les cylindres à la prothèse provisoire. La prothèse provisoire est repolie par le prothésiste facilement. Elle est livrée 30 minutes après. Elle comporte le bridge usiné donc en PMMA (Ivotion Dent Multi – Ivoclar) et de la fausse gencive composite (Gradia GC). Nous pouvons voir la très bonne intégration de ce bridge tant dans les critères esthétiques et fonctionnels (fig. 13, 14, 15, 16 et 17).

L’optimisation de la position biologique des implants lors du traitement de l’édenté complet (cicatrisation initiale et maintien des tissus) nous apparaît être facilitée par l’utilisation de la navigation implantaire. Cet outil nous permet d’augmenter nettement la précision implantaire mais aussi d’anticiper et de faciliter la mise en fonction immédiate par un bridge provisoire usiné préchirurgicalement. Cette prothèse usinée en amont et connectée est la parfaite illustration de la précision apportée par la navigation.
Retour
N’hésitez pas
à nous contacter !